-
Bilan
provisoire fin 2005
Rouge sang et notoirement déloyal, la planète Mars est terriblement
tentante à proximité de la Terre et pourtant très difficile
atteindre. Historiquement seulement une mission sur trois a atteint la
planète. Pendant des décennies, la faible chance d'explorer Mars avec succès
a sévèrement limité notre capacité d'en savoir plus sur notre voisine planétaire.
Incroyablement, en 1997 la Nasa a commencé
un renversement de tendance remarquable dans l'exploration de la planète rouge quand l'agence a
fait atterrir la première sonde sur Mars depuis 22 ans.
Non seulement l'atterrissage casse la
tendance, mais il a également ouvert la voie d'une nouvelle exploration
permettant d'affirmer que c'est simplement la "Planète
Rouge" !
Lorsque le géologue
Matt Golombek accepta le défi d'envoyer le robot Pathfinder explorer
Mars en 1994, il
il
était conscient que la voie vers la planète serait difficile. Il déclara que
"personne n'était retourné sur Mars depuis les années 70".
La dernière fois, c'était en 1975 lorsque les Viking 1 et 2 s'y posèrent.
Jamais Golombek n'avait imaginé que son vaisseau spatial connaîtrait la
gloire.
"Pathfinder
fut une mission dont le but était de tester la méthode "plus
rapide à construire, moins cher et mieux" avec un lander
compact et un système ingénieux pour amortir son
atterrissage. Le lander était emmitouflé dans un airbag, dont c'était la
première utilisation par les américains" déclara Golombeck. Avant
Pathfinder, les sondes martiennes étaient équipées de rétrofusées complexes pour commander avec précision leur
atterrissage. Le nouveau système
d'airbag était bien plus simple et plus indulgent, parce qu'il a permis à
la sonde de rebondir en douceur et de rouler comme un ballon de plage jusqu'à
l'arrêt.
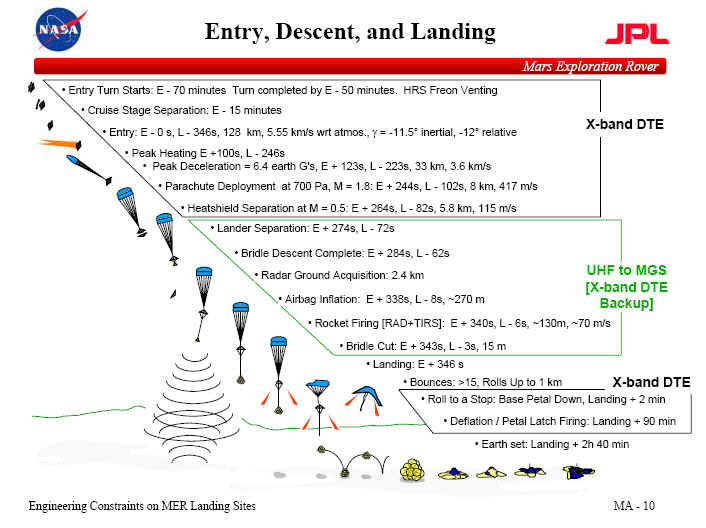
http://webgis.wr.usgs.gov/mer/Sep_2001_presentations/Adler/engr-constraints-jpl.pdf
Pour
en savoir plus sur la séquence: http://mars.jpl.nasa.gov/MPF/mpf/edl/edl1.html
C'est à 284 m au-dessus du sol que
les airbags sont gonflés (8s avant l'atterrissage). Le lander et le rover sont
repliés à l'intérieur bien protégés contre le choc de l'impact. Ensuite, à
100 m, 3 rétrofusées sont mises à feu (poussée 1 tonne pendant 2s) pour
réduire la vitesse verticale à 0 et réduire au minimum la vitesse
horizontale. A une hauteur de 12 m l'ensemble airbags et lander se détachent tombent en chute
libre sur la surface. L'impact s'est fait à 25 m/s sous un angle de 30°.
L'ensemble rebondit de 12 m pour retomber 100 m plus loin et ainsi de suite
(> 15 bonds) sur
un peu plus d'un kilomètre et ce, pendant quelques minutes. Après l'arrêt, il
faut attendre plus d'une heure pour que les airbags se dégonflent et se
rétractent complètement. Finalement au bout de 3 heures, tout est prêt.
|

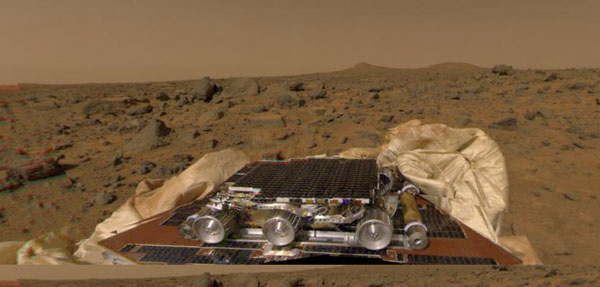
Le petit Sojourner, le premier
robot destiné à l'exploration de la surface de la planète Mars.
Credit: NASA.
|
Pour
en savoir plus: Airbags
et ouverture
Ce 4 juillet 1997, replié
à l'intérieur des airbags, se trouvaient le lander avec ses
pétales articulés en forme de pyramide, qui se sont dépliées au bout de quelques heures, libérant
la plate-forme scientifique Pathfinder et le petit véhicule Sojourner. Pathfinder
était la station principale équipée de caméras, scanners et
équipements de transmissions pour les liaisons avec la Terre et qui
servait de relais au micro rover.
Côte
à côte avec Pathfinder, fixé sur un pétale, il y avait l'intrépide Sojourner.
Ne pesant pas plus de 11 kg sur la Terre ou 4 kg sur Mars, Sojourner est arrivé
sur Mars avec un seul but. "La fonction primiaire de Sojourner était de
démontrer qu'un petit véhicule pouvait opérer sur Mars.
Le travail de Sojourner fut de vagabonder
et d'étudier quelques roches, la question étant de savoir les limites
du petit géologue de 63 cm. Sa vitesse de déplacement était de 1
cm/s.
Pathfinder est équipée, entre autre, d'une caméra CCD, installée sur un mât, à 1,5 m
de hauteur, permettant de suivre les évolutions de Sojourner et de voir le paysage.
Sojourner est équipée lui aussi d'une caméra, à 1 m du sol, permettant une vision
grand angle à 180°. L'ensemble permit à la Terre entière de suivre les
pérégrinations du robot, en direct sur Internet.
Au loin, les 2 collines de quelques dizaines de m de haut, sont distantes de 1 km et
furent baptisées, par le JPL: Twin Peaks.
Sojourner fact sheet: http://mars.jpl.nasa.gov/MPF/mpf/fact_sheet.html
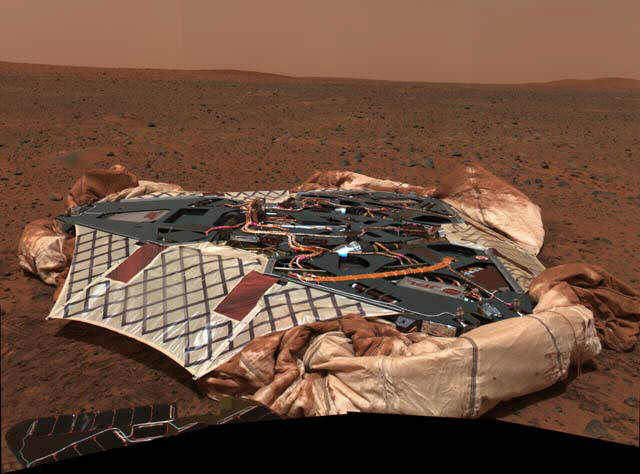
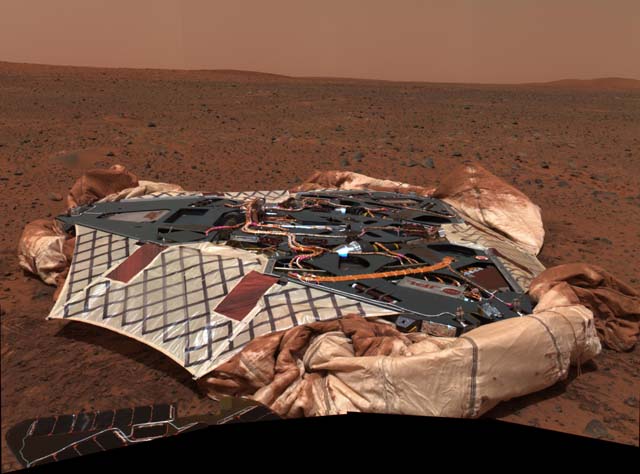
http://www.space.gc.ca/asc/img/mars_pathfinder_terrain.jpg
La plate-forme Pathfinder avec Sojourner encore
replié après l'atterrissage du 4 juillet 1997
.
Après l'atterrissage, une rampe d' accès de chaque côté permit au robot de descendre.
Il y a eu un petit problème, lors de la phase de descente, car l'enveloppe des ballons
était repliée partiellement sur la rampe, l' empêchant de descendre. Bien
qu'éloignés de 200 millions km, les techniciens ont réussi à télécommander les
opérations de descente, malgré les temps de transmissions longs, avec la Terre (10
mn).
Sojourner mesure 630 mm de long et 480
mm de large. 6 roues indépendantes, lui permettent de se déplacer quelque soit le
terrain, toutefois les obstacles ne devaient pas dépasser les 120 mm de haut. La
puissance électrique disponible, assurée par un panneau solaire, était de
10
W, pour
une vitesse max de 24 m/h. Sa vitesse
de croisière fut de 40 cm/mn.
Pour sélectionner le site
d'atterrissage, Golombeck n'a pu se baser que sur des images de
mauvaises qualités, prises 20 ans auparavant, à gauche de Viking. Se
basant sur les meilleures estimations, il choisit de débarquer dans un
"lit de fleuve asséché" où il pensait obtenir des roches
intéressantes et obtenir une zone suffisamment grande pour un
atterrissage risqué. "Nous avions besoin d'une autoroute"
déclara Golombek.
Le jeu de Golombek a payé avec un atterrissage sûr et
un incroyable engouement sur Terre."Dans un sens, ce fut la première
zone d'atterrissage pour une nouvelle génération; Pathfinder a eu la
premier page du New-York Times et du Los Angeles Times pendant une
semaine" raconta Golombek.
L'abondance
des roches trouvées par Sojourner ont fait frémir de joie tous les
scientifiques.
Le site se trouve à l'embouchure (largeur 100 km) de
l'ancien lit d'une rivière.
Ares Vallis est une vallée de 1500 km de long sur 25 km de large
et de quelques centaines de mètres de profondeur. Le lieu fut, il y a plus d'un milliard
d'années, inondé. La hauteur de l'eau a semble-t-il, atteint de 10 à 20 m.
Pour la première fois, la forme et les types de roches examinées par le
rover ressemblaient à celles situées à des millions de km sur Terre. De
plus, il y a eu une découverte de quelque chose bien plus significative.
"Il
y avait des indices d'un passé aqueux" continue Golombek. Le
véhicule trouva de petits cailloux ronds ressemblant à un type de roche
qui se forme dans l'eau appelé "conglomérat". Golombek et ses
collègues commencèrent à se demander si Mars la sèche et sans vie,
n'avait pas été une terre humide et fertile. "Cela ouvrit le champ
aux géologues martiens" conclut Golombek.
Tandis que Pathfinder et le Sojourner
creusaient dans la poussière, un nouveau satellite -- Mars Global Surveyor
-- était sur le chemin pour étudier Mars depuis le ciel. "Pour
Surveyor, l'idée était de mettre la sonde sur une orbite polaire pour
étudier systématiquement le temps et la surface" raconte le chef
du projet scientifique Arden Albee.
-
L'aérofreinage
Le satellite fut lancé de Floride le 7 novembre 1996. Filant
comme un éclair dans l'espace, la sonde avait besoin d'être freinée pour
être prise par la gravité martienne. Pour obtenir ce résultat, Albee et
son équipe d'ingénieurs et de scientifiques utilisèrent une méthode
expérimentale et radicale pour ralentir la course du satellite. "Nous
fûmes les pionniers de l'aérofreinage
autour de Mars, avec Mars Global Surveyor" dit Albee.
L'aérofreinage fut utilisé pour la première fois en 1993 par la sonde
Magellan, autour de Vénus. Il permet une économie substantielle de
carburant, ce qui profite aux équipements scientifiques.

L'aérofreinage
est initialisé après l'insertion en orbite, ce qui place l'engin sur une
orbite fortement elliptique. Dans le cas de Mars Global Surveyor, l'orbite
elliptique après l'orbite d'insertion, était une orbite de 48 h qui fut
réduite à une orbite circulaire de 2 h. Pour que l'aérofreinage
fonctionne efficacement, quelques petites impulsions à l'aide de petits
propulseurs sont requises pour affiner le périapse.
Lors des premières manoeuvres d'aérofreinage de MSG, les paramètres
atmosphériques furent sous-estimés. Il s'ensuivit des vibrations qui
faillirent devenir catastrophiques. Un panneau fut déformé. La manoeuvre
fut mise en sommeil, le temps que les contrôleurs de vol comprennent le
phénomène. Depuis, des limites atmosphériques de densité sont placées sur la mission
selon les possibilités dynamiques maximales de pression et de la température
de la sonde.
La densité critique pour MSG avait
été déterminée à 143 kg/km3 (donnée au périapse), laquelle fut
utilisée pour la qualification des panneaux solaires, dont la surface est de
17,02 m2. Ainsi, le
périapse doit être augmentée si la densité s'accroît au- delà d'une
certaine limite.
Dès sa mise en orbite,
l'engin commence à ralentir à l'aide de
ses panneaux solaires, grâce à la forte densité
due aux poussières flottant dans une atmosphère aussi ténue que celle située
à 30 000 m sur Terre. Durant ses orbites elliptiques de 14 à 2 heures, le
passage au périapse (160 km) freine la sonde.
Pendant
chacune de ses longues
boucles elliptiques autour de Mars, la sonde traverse les couches supérieures
de l'atmosphère chaque fois qu'elle fait son approche au plus prés de la planète.
Le frottement de l'atmosphère sur le vaisseau spatial et ses panneaux solaires,
positionnés comme des ailes, lui fait perdre une partie de son élan à chaque
approche étroite, connu comme un "passage aérodynamique".
Puisque le vaisseau ralentit à chaque passage au périapse, l'orbite se
circularise progressivement.
L'aérofreinage se produit en 3 phases que les ingénieurs appellent entrée,
phase principale et sortie. La phase d'entrée se produit durant
les quatre premières des huit orbites suivant l'arrivée. La phase
principale commence une fois que le point le plus proche de la sonde à la planète,
a été abaissé à environ 100 kilomètres au-dessus de la surface. Comme l'orbite du vaisseau spatial est réduite et
circularisée pendant approximativement 273 freinages en 76 jours, le périapse
se déplace vers le nord, presque directement vers le pôle nord. De petites
rétrofusées mises à feu quand le vaisseau spatial est à
son point le plus éloigné de la planète maintiennent le niveau de traînée
désiré pour limiter l'échauffement et la pression dynamique. La phase de
sortie se produit durant les derniers jours lorsque la période orbitale est la
plus courte.
-
Mars
Global Surveyor
Une fois que MSG fut sur l'orbite visée, il a commencé
à l'aide de ses caméras par nous montrer les structures majestueuses de la planète.
Dans le ciel martien, Surveyor nous a révélé une planète
avec des terrains surprenants.
Les pôles sont apparus peu accidentés et couverts de neige carbonique, tandis qu'aux
latitudes moyennes furent découverts des volcans peut-être endormis, de
grands déserts et des plateaux rocheux. Le plus étonnant fut la
découverte de chenaux probablement découpés par l'eau. La sonde a aussi
détecté près de l'équateur une parcelle d'oxyde ferreux
sur 500 km de large, un produit qui ne se forme qu'en présence de l'eau.
Sur une échelle globale, le satellite a déterminé que Mars a de nombreux champs magnétiques.
Très tôt dans l'histoire martienne, le magma fondu apparaît avoir filtré à
travers la croûte. Le magma montant s'est refroidi dans des poches magmatiques, créant
des champs magnétiques d'intensité irrégulière. La forme et l'organisation des champs indiquent également
le déplacement des plaques de la planète et les fractures de la croûte
pour former rifts et montagnes comme ceux sur Terre.
En 2001, Surveyor fut rejoint par Mars Odyssey. Odyssey fut envoyé pour
analyser la composition de surface et le niveau de radiations. Initialement, les
2 satellites avaient des missions indépendantes. Mais peu de temps après, 2
nouveaux engins eurent besoin de leur coopération: les Mars Exploration Rovers
Opportunity et Spirit.
-
Rovers
Joy Crisp scientifique au projet Mars Exploration Rover
croit que ses géologues robotisés
doivent beaucoup au travail de Surveyor et Odyssey. "Ils ont
joué un rôle de premier plan sur le choix des sites d'atterrissage.
Ils furent la clé de notre succès scientifiquement et pour
l'atterrissage" a déclaré Crisp.
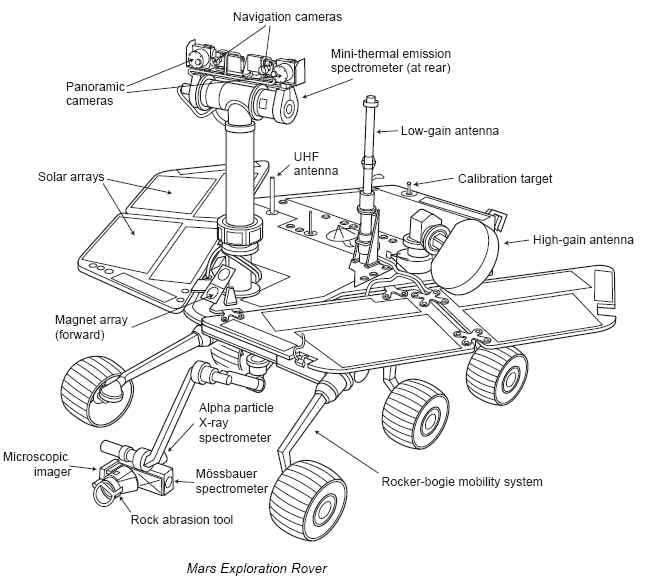
Les MER, Opportunity et Spirit, sont les directs descendants du couple
Pathfinder/Sojourner. Mais cette fois, chaque lander a porté un plus grand
rover tout-terrain.
http://www.solarviews.com/browse/mars/PIA05117.jpg
Plate-forme des MER (Mars Exploration
Rover). La différence est due à la masse des rovers
Spirit et
Opportunity et au fait qu'ils n'ont pas besoin d'une station principale,
puisqu'ils sont autonomes.
Les rovers de la taille d'une voiturette de golf
robotisée et autonome, transportent
leur propre matériel scientifique, leur propre alimentation et leur propre
équipement de transmissions.
Spirit et Opportunity ont atterri en janvier 2004, sur des zones du globe
martien à l'opposé l'une de l'autre. Spirit s'est posé à l'intérieur du
cratère d'impact Gusev. Un hémisphère plus loin, Opportunity avait pour cible
la grande plaine désertique appelée Meridiani Planum. Les deux rovers sont arrivés pour continuer de rechercher
les preuves géologiques de la présence de l'eau permanente dans un passé
lointain.
Opportunity a deviné les premiers signes de l'eau sur un petit affleurement
rocheux. "L'eau aurait été présente dans la zone pendant un certain
temps car elle s'est déposée sur des roches et plus tard les a infiltrées"
a expliqué Crisp. Il s'avéra qu'un gros morceau de roche en place avait, par le passé,
baigné dans l'eau.
Crisp
et son équipe ont découvert de petites billes sphériques parsemant la roche en place.
Ils
suspectèrent que ces petites billes étaient pour la plupart susceptibles
d'être une autre forme de concrétions qui se forment quand le fer précipite hors de l'eau qui a
imprégné les roches. Trouvées à côté des concrétions, il y avait de petits
cachettes et crevasses identifiées comme " vides lenticulaires."
Ces petites marques sont souvent laissées après que les cristaux, portés
par les eaux, se brisent en raison du mouvement de l'eau ou des changements chimiques.
Peut-être que la preuve la plus forte
de l'eau est venue de l'analyse chimique qui a montré que la roche était riche
d'une sorte de sel appelé jarosite. Sur
Terre, des roches contenant beaucoup de jarosite ou bien se forme dans l'eau ou
bien sont fortement changées par de longues expositions dans l'eau. La
présence de sel suggère que la roche peut être autrefois restée dans un lac
acide.
-
Mazatzal
Peu de temps après, Spirit trouva aussi la preuve d'un passé aquatique de
l'autre côté de Mars. Tandis qu'il explorait le cratère Gusev, le rover
étudia un bloc rocheux et poussiéreux, sur
les flancs du cratère Bonneville, appelé
Mazatzal (ci-dessous) qui était faite de couches et de bandes de différents
matériaux. Les géologues suspectent que la roche,
du basalte, ait été autrefois mouillée par des eaux souterraines et que les
fractures seraient des fissures remplies par des minerais portés à
l'intérieur par un mince filet d'eau. 
(Photo : NASA/JPL/Cornell): http://www.space.gc.ca/asc/img/mars_mazatzal.jpg
Mazatzal est parcourue par de
petites fractures comblées par des minéraux
qui pourraient avoir, peut-être, précipité à partir d'une eau
souterraine.
Grâce à son outil
d'abrasion (RAT) Spirit a observé quatre couches bien distinctes sur le
rocher Mazatzal : une premier couche superficielle de poussière, une
couche fine brune, une seconde plus sombre et enfin le rocher lui-même.
Selon Hap McSween, ces couches ajoutées aux failles brillantes
observées pourraient correspondre à trois périodes différentes connues
par la roche : lorsqu’elle était enfouie, transformée par l’eau et
enfin apparente en surface comme aujourd’hui.
Avec la découverte de l'existence d'une eau passée, les deux rovers ont stupéfié des scientifiques et
les observateurs en parvenant à explorer la planète bien plus longtemps que prévu.
" Les prévisions parlaient de 90 jours, mais nous avons été agréablement étonnés qu'ils ont continué à
fonctionner" a dit Crisp. Les 2 rovers ont survécu pour l'instant à plus de
600 jours avec, il faut bien le dire quelques jours de déprime vite oubliés.
Après ses 17 premiers jours sur
Mars, Spirit a brutalement et mystérieusement cessé ses communications avec
la Terre. La NASA fut doublement inquiète sachant que Opportunity débarquait seulement cinq jours plus tard et
pouvait tomber sur le même problème que son jumeau. Le logiciel de vol de
Spirit avait des ennuis. Le problème provoqua la perte de communications et
la réinitialisation du calculateur 60 fois en 3 jours.
La NASA a d'abord crû qu'il
faudrait des semaines pour rétablir le rover comateux. Mais juste trois jours
plus tard, les ingénieurs ont déterminé que les problèmes de Spirit
venaient d'une mémoire flash qui sert à sauvegarder les fichiers en
l'absence d'alimentation. Les ingénieurs ont résolu le problème en stockant
temporairement les fichiers dans une portion différente de la mémoire et en
réinstallant le logiciel. La panne résolue, les ingénieurs surent éviter
le même problème à Opportunity.
Tandis que Opportunity parvenait à éviter l'issue de Spirit, le rover a littéralement
eu ses propres ennuis. Au 446e jour sur le sol martien, Opportunity s'enlisa
du 13 mai au 4 juin 2005.
Environ 2,4 m de long pour 30 cm de haut et une pente de 15° ont prouvé que
c'était trop difficile à grimper pour le rover, dans ce sable si fin.
La dune semblait être faite de grains de sable très fins offrant
ainsi un faible pouvoir de traction aux roues. Ne voulant pas aggraver les
choses et s'enfoncer plus profondément, les ingénieurs ont arrêté la
rotation des roues pour travailler à un plan d'échappement. 
http://www.universetoday.com/am/uploads/2005-0525wheel-full.jpg
Les ingénieurs construisirent un bac à sable et le remplir d'un
mélange de matériaux divers pour simuler le piège à sable dans lequel se
trouvait Opportunity. Ensuite, ils ont reproduit les conditions d'enlisement
avec un rover d'essai, resté sur Terre. Ils ont pu trouver une solution et
sortir le rover de ce pétrin grâce à une marche arrière soigneusement
étudié sur le bac à sable. Depuis, ils ont donné de nouvelles directives
au rover pour progresser avec beaucoup de précautions en testant le
dérapage Exactement
comme les rovers roulant à travers la surface martienne, la marche de
la
NASA à travers la planète énigmatique continue. La sonde Mars
Reconnaissance Observer, lancée en août 2005, va arriver début mars 2006
pour rejoindre MSG et Mars Odyssey en orbite. Puis
ce sera le tour de Phoenix pour un
lancement en 2007 et du laboratoire scientifique martien (Mars Science
Laboratory) qui arrivera en 2009. Peut-être que ces missions futures verront
la résolution de l'énigme de l'eau et permettront l'arrivée de l'homme dans
les décennies à venir.
Source: SpaceDaily
|











{kind=link}
{kind=link}